The 9 Best Reality Modelling Technologies for AEC Industry
Issue #23

I’m Vignesh Kaushik. I curate and write articles on Thank God It’s Computational to help architects, designers, and urban planners leverage cutting-edge technologies on AEC projects.
TGIC is a community-driven platform providing concise technology education to students and professionals in the AEC industry to learn at their own pace. If you’re not a member, consider joining the community and supporting our work.
The technology for aligning the real world of construction data with the virtual world of design and BIM is very much a work in progress. A ‘single source of truth’ has always been the holy grail, but the construction process has made it elusive. The ability to add recurring high resolution actionable imagery data to BIM models is a gamechanger. BIM no longer has to be only the design/engineering model; it can be the constantly updated record of construction.
Start-ups like Skycatch and Reconstruct and others are working from the drone-and-imagery side, while experienced AEC technology vendors like Autodesk, Bentley and Trimble are working from the design data side. An overview of the leading vendors and their work reveals a variety of approaches to the challenge of aligning the real and the virtual in construction.
In this issue, let’s take a look at some of the most promising software, tools and technologies for real world scanning, also known as reality modeling or reality capture.
Drone Scanning Technologies
Skycatch • Drone Photos to High Precision 3D Models
Skycatch is a data company that happens to use drones to collect data. Skycatch’s drones photograph job sites, captures imagery and automatically generates 3D site data. The Skycatch technology stack comprises of three layers: the drone hardware and control technology; apps for data review and editing the gathered imagery; and a cloud intelligence platform, for turning imagery and scans into actionable data. The data can be quickly laid over site drawings or models to automatically calculate area and volume of earth to be moved. The results are transmitted as instructions to Smart Construction machinery for fully autonomous work on the site.

3DR Site Scan • Complete Drone Data Platform
3DR’s Site Scan is primarily software-as-a-service that enables drone users to precisely control their flights and on-board cameras, then send data straight from those to the cloud. 3DR’s Site Scan lets users overlay the high-res imagery and data that they have captured via drones with site-plan information stored in BIM, or use those images in conjunction with geographic information services like Esri. Overlaying this data gives contractors, structural engineers and architects a way to quickly and visually identify potential problems and avoid building delays.

Reconstruct • Construction Progress Monitoring
Built by a team of university professors, the startup began as a project called the Flying Superintendents. The startup uses aerial drones to take video and images of construction sites to provide construction progress monitoring. The web-based platform continuously reconstructs and visualizes Reality directly within 4D BIM, measures progress and productivity, and analyzes risk for delay. The goal is to create a predictive computer vision system for construction site data analysis that runs with minimal human interaction and can navigate using construction site data.

ContextCapture • Reality Modeling For Infrastructure
ContextCapture allows users to produce 3D meshes of existing real-world conditions, including scales as large as entire cities, from simple photographs. ContextCapture turns photos into detailed photo-textured 3D mesh models that integrate with a range of software from Bentley and other vendors. The models are precise enough to measure from or use for comparing as-built with design. With ContextCapture, a set of photos up to 100 gigapixels in size can be converted into a single detailed model. The models are inherently georeferenced through both device positioning data and precise control points.

SKUR • Visualizing Construction Variance
SKUR gives the construction industry rapid insight into the difference between what was designed and what was built. SKUR can cloud process scan files containing more than 100,000,000 data points and quickly compare these massive files to specific objects or groups of objects within your CAD design file. SKUR’s sophisticated algorithms remove noise from your data, such as equipment and debris and can tell you not only that an object is off, but by how much and in what direction.

Scan to BIM Technologies
Autodesk ReCap • Combine both UAV & Laser Scan Data
ReCap 3D scanning software and web services helps you create intelligent 3D models from laser scans and UAV photos. ReCap 360 provides automatic stitching and registration of scan data to CAD/BIM files and can be used to measure items depicted in scans. The resulting data can be used in all Autodesk AEC and civil engineering applications including AutoCAD, Revit, Navisworks, Infraworks and others.

EdgeWise • Laser Scan to Revit
ClearEdge offers the most enhanced laser scan to Revit model process, using advanced shape recognition algorithms. EdgeWise uses algorithms that can automatically identify and extract walls, windows, doors and other features from point clouds and export them as Revit family objects. You can even teach the software to find repeated objects by highlighting the part of the point cloud and the software attempts to learn the pattern. It will then search through the point cloud and identify the objects.

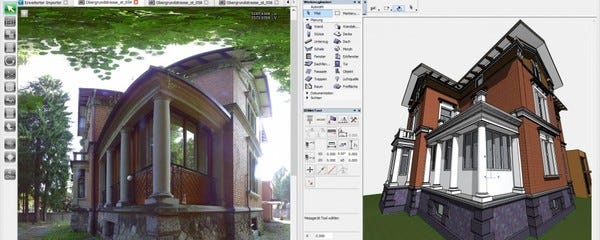
PointCab4BIMm • Point Clouds to ARCHICAD
PointCab is one software for all point clouds. PointCab4BIMm imports data of all common terrestrial laser scanners, handheld scanners and point clouds from flights with drones and instantly and automatically calculates layouts and sectional views within minutes. Additionally PointCab offers extracting floor plans or sections as a basis for distortion-free 2D plans, vectorization and profile, meshes, DGMs, difference images and allows to export them into ARCHICAD.
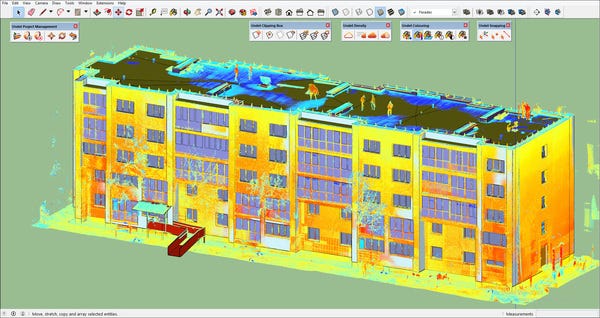
Undet • Point Clouds to SketchUp Pro
Undet for SketchUp V1 offers a unique opportunity to use any pointcloud directly in SketchUp Pro and provides great tools for efficient pointcloud visibility and coloring management. Undet is hardware independent and allows to bring in numerous file types from different scanner vendors. *.E57, *.LAS, *.LAZ, *.PTS, *.DP, *.FLS, *.FPR, *.LSPROJ, *.FWS, *.CL3, *.CLR, *.ZFS, *.RSP, ASCII / NEZ (X,Y,Z/i/RGB). So you can bring in pointclouds derived from any technology or application such as Airborne LiDAR, UAV/UAS/Drones, Mobile Mapping Systems, Terrestrial Scanners, Handheld Scanners or Photogrammetry.